ABB机器人基本操作说明(PPT 32页)
ABB机器人基本操作说明(PPT 32页)内容简介
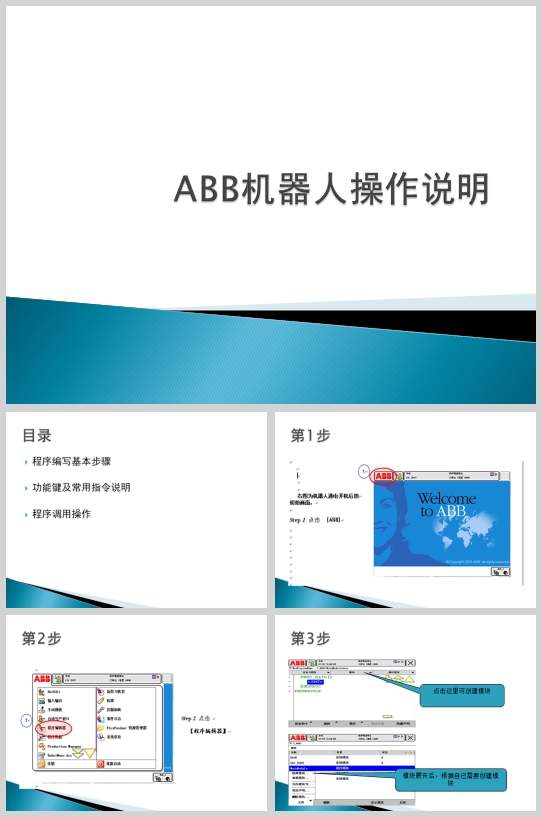
程序编写基本步骤
功能键及常用指令说明
程序调用操作
功能键及指令用法
本窗口为非焊接状态下运转的常用指令
本窗口为焊接的常用指令
程序图例
常用指令细节说明
ArcLStart、ArcCStart以直线或圆弧运动行走至焊道开始点,并提前做好焊接
准备工作。(注意不执行焊接)
ArcLStartp1,v100,seam1,weld1,z10,tool1;
ArcLEnd、ArcCEnd焊接直线或圆弧至焊道结束点,并完成填弧坑等焊后工作
不管Zone参数指定的圆角是多少,目标点一定是个fine点。
ArcLENDp1,v100,seam1,weld1,z10,tool1;
功能键说明
程序执行功能键
..............................
功能键及常用指令说明
程序调用操作
功能键及指令用法
本窗口为非焊接状态下运转的常用指令
本窗口为焊接的常用指令
程序图例
常用指令细节说明
ArcLStart、ArcCStart以直线或圆弧运动行走至焊道开始点,并提前做好焊接
准备工作。(注意不执行焊接)
ArcLStartp1,v100,seam1,weld1,z10,tool1;
ArcLEnd、ArcCEnd焊接直线或圆弧至焊道结束点,并完成填弧坑等焊后工作
不管Zone参数指定的圆角是多少,目标点一定是个fine点。
ArcLENDp1,v100,seam1,weld1,z10,tool1;
功能键说明
程序执行功能键
..............................
下一篇:尚无数据