机械设计基础之平面机构运动简图及自由度(PPT 48页)
机械设计基础之平面机构运动简图及自由度(PPT 48页)内容简介
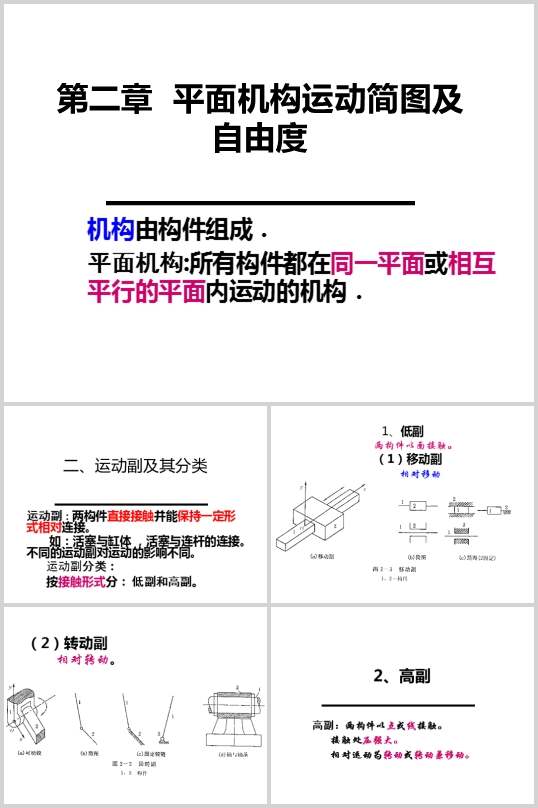
第二章平面机构运动简图及自由度
二、运动副及其分类
1、低副两构件以面接触。
(1)移动副相对移动
(2)转动副相对转动。
2、高副
高副举例
第二节平面机构运动简图
注意构件和运动副的表示方法
画机构运动简图的步骤
例:鄂式破碎机的运动简图
第三节平面机构自由度计算
平面机构自由度计算举例
二、计算平面机构自由度的注意事项
1、复合铰链:由两个以上构件在同一处以转动副连接构成。
例2-3计算图示八杆机构的自由度
2、局部自由度与机构整体运动无关、局部的独立运动。
3、虚约束对机构运动不起限制作用的约束。应除去不计。常出现在下列场合:
(1)两构件见组成多个移动副,且导路平行。只一个起作用。
(2)两构件间组成多个转动副,且轴线重合。
(3)平行四边形机构的多余约束
(4)对运动不起独立作用的对称部分
例2-4计算图示机构的自由度,DE=FG,DF=EG,DH=EI。
第三章平面连杆机构第一节概述平面连杆机构:由若干杆件以低副构成的平面机构。一、铰链四杆机构
1、曲柄摇杆机构曲柄:能做360°整周转动的连架杆。摇杆:只能做小于360°摆动连架杆。
2、双曲柄机构两个连架杆均为曲柄(均可作整周转动)。
3、双摇杆机构两个连架杆均为摇杆。
二、含有一个移动副的四杆机构移动副可以看作是转动副演化而来的。1、曲柄滑块机构
2、摆动导杆机构
3、转动导杆机构
4、摆块机构
5、移动导杆机构(定块机构)
三、含有两个移动副的四杆机构
..............................
二、运动副及其分类
1、低副两构件以面接触。
(1)移动副相对移动
(2)转动副相对转动。
2、高副
高副举例
第二节平面机构运动简图
注意构件和运动副的表示方法
画机构运动简图的步骤
例:鄂式破碎机的运动简图
第三节平面机构自由度计算
平面机构自由度计算举例
二、计算平面机构自由度的注意事项
1、复合铰链:由两个以上构件在同一处以转动副连接构成。
例2-3计算图示八杆机构的自由度
2、局部自由度与机构整体运动无关、局部的独立运动。
3、虚约束对机构运动不起限制作用的约束。应除去不计。常出现在下列场合:
(1)两构件见组成多个移动副,且导路平行。只一个起作用。
(2)两构件间组成多个转动副,且轴线重合。
(3)平行四边形机构的多余约束
(4)对运动不起独立作用的对称部分
例2-4计算图示机构的自由度,DE=FG,DF=EG,DH=EI。
第三章平面连杆机构第一节概述平面连杆机构:由若干杆件以低副构成的平面机构。一、铰链四杆机构
1、曲柄摇杆机构曲柄:能做360°整周转动的连架杆。摇杆:只能做小于360°摆动连架杆。
2、双曲柄机构两个连架杆均为曲柄(均可作整周转动)。
3、双摇杆机构两个连架杆均为摇杆。
二、含有一个移动副的四杆机构移动副可以看作是转动副演化而来的。1、曲柄滑块机构
2、摆动导杆机构
3、转动导杆机构
4、摆块机构
5、移动导杆机构(定块机构)
三、含有两个移动副的四杆机构
..............................
下一篇:尚无数据