KUKA机器人培训教材(PPT 30页)
KUKA机器人培训教材(PPT 30页)内容简介
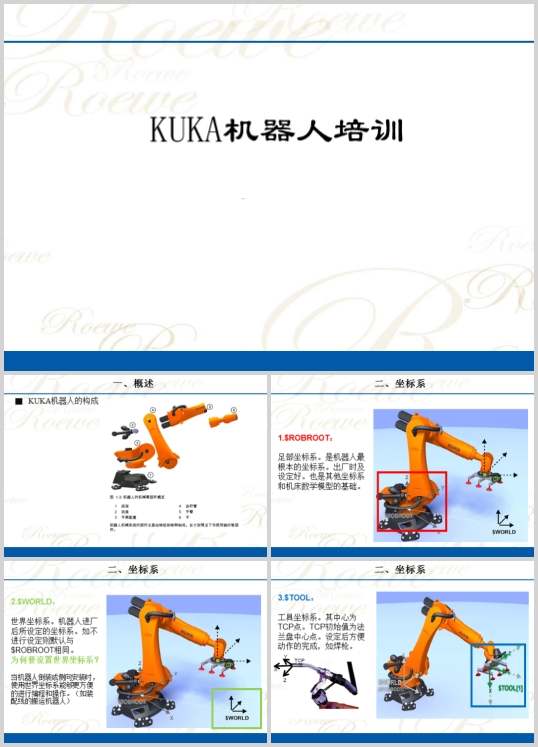
1.$ROBROOT:
足部坐标系。是机器人最
根本的坐标系。出厂时及
设定好。也是其他坐标系
和机床数学模型的基础。
2.$WORLD:
世界坐标系。机器人进厂后所设定的坐标系。
如不进行设定则默认与$ROBROOT相同。
为何要设置世界坐标系?
当机器人倒装或侧向安装时,
使用世界坐标系能够更方便的进行编程和操作。
(如装配线的搬运机器人)
3.$TOOL:
工具坐标系。其中心为TCP点。
TCP初始值为法兰盘中心点。
设定后方便动作的完成,如焊枪。
..............................
足部坐标系。是机器人最
根本的坐标系。出厂时及
设定好。也是其他坐标系
和机床数学模型的基础。
2.$WORLD:
世界坐标系。机器人进厂后所设定的坐标系。
如不进行设定则默认与$ROBROOT相同。
为何要设置世界坐标系?
当机器人倒装或侧向安装时,
使用世界坐标系能够更方便的进行编程和操作。
(如装配线的搬运机器人)
3.$TOOL:
工具坐标系。其中心为TCP点。
TCP初始值为法兰盘中心点。
设定后方便动作的完成,如焊枪。
..............................
下一篇:尚无数据