机器人备份和恢复的操作指导书(DOC 41页)
机器人备份和恢复的操作指导书(DOC 41页)内容简介
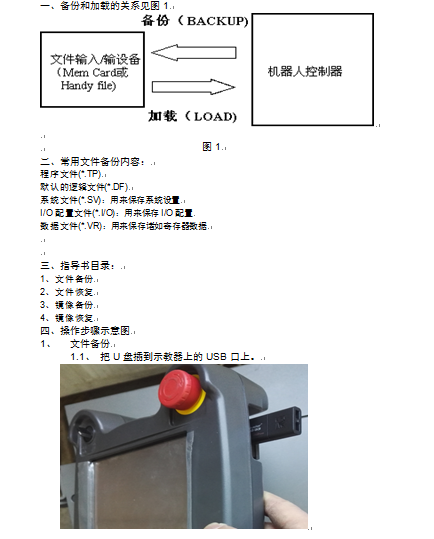
一、备份和加载的关系见图1
三、指导书目录:
下图是新建了一个“20170331”的文件夹
二、常用文件备份内容:
制作人:穆绪刚
发那科机器人备份和恢复的操作指导书
四、操作步骤示意图
数据文件(*.VR):用来保存诸如寄存器数据
程序文件(*.TP)
系统文件(*.SV):用来保存系统设置
默认的逻辑文件(*.DF)
1.10、选择创建目录
1.11、按ENTER,进入如下画面
1.12、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹
1.13、输入完成后,按enter
1.14、按备份,进入如下
1.15、选择以上所有,按ENTER
1.16、屏幕会出现2次类似“删除….?”的字样,按是即可。
1.17、屏幕会显示“正在备份….”的字样,
1.18、备份完成后,会显示下面
1.19、备份就完成了。
1.1、把U盘插到示教器上的USB口上。
1.2、按MENU键,显示菜单.
1.3、选择文件
1.4、按ENTER
1.5、选择工具
1.6、选择切换设备,按enter,进入如下界面
1.7、选择TP上的USB(UT1:)
1.8、按ENTER进入如下界面,
1.9、然后按工具
1、文件备份
2.加载部分文件或者全部恢复
2.10、按MENU键,显示菜单,选择文件
..............................
三、指导书目录:
下图是新建了一个“20170331”的文件夹
二、常用文件备份内容:
制作人:穆绪刚
发那科机器人备份和恢复的操作指导书
四、操作步骤示意图
数据文件(*.VR):用来保存诸如寄存器数据
程序文件(*.TP)
系统文件(*.SV):用来保存系统设置
默认的逻辑文件(*.DF)
1.10、选择创建目录
1.11、按ENTER,进入如下画面
1.12、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹
1.13、输入完成后,按enter
1.14、按备份,进入如下
1.15、选择以上所有,按ENTER
1.16、屏幕会出现2次类似“删除….?”的字样,按是即可。
1.17、屏幕会显示“正在备份….”的字样,
1.18、备份完成后,会显示下面
1.19、备份就完成了。
1.1、把U盘插到示教器上的USB口上。
1.2、按MENU键,显示菜单.
1.3、选择文件
1.4、按ENTER
1.5、选择工具
1.6、选择切换设备,按enter,进入如下界面
1.7、选择TP上的USB(UT1:)
1.8、按ENTER进入如下界面,
1.9、然后按工具
1、文件备份
2.加载部分文件或者全部恢复
2.10、按MENU键,显示菜单,选择文件
..............................
下一篇:尚无数据