ABB机器人的手动操作(DOC 24页)
- 所属分类:
- 智能制造
- 文件大小:
- 1915 KB
- 下载地址:
- 相关资料:
- 机器人
ABB机器人的手动操作(DOC 24页)内容简介
1.使用RobotStudio建模功能进行3D模型的创建
1.单轴运动
1.手动操纵的快捷按钮
11.选择“编辑电动机校准偏移”。
12.将机器人本体上电动机校准偏移记录下来(位于机器人机身)。
1)更换伺服电动机转数计数器电池后。
2.单击“捕捉末端”。
2.对3D模型进行相关设置
2.手动操纵的快捷菜单
2.线性运动
2)当转数计数器发生故障,修复后。
3.单击B角点。
3.单击“显示详情”展开菜单。
3.1任务目标
3.2任务描述
3.3.1手动操作三种模式
3.3.2RobotStudio中的建模功能
3.3知识储备
3.4.1单轴运动的手动操纵
3.4.2线性运动
3.4.3重定位运动
3.4.4增量模式控制机器人运动
3.4任务实施
3.5.1手动操纵的快捷方式
3.5.2ABB机器人转数计数器更新操作
3.5.3RobotStudio中测量工具的使用
3.5知识链接
3.重定位运动
(1)测量垛板的长度
(2)测量锥体的角度
(3)测量圆柱体的直径
(4)测量两个物体间最短距离
(5)测量的技巧
..............................
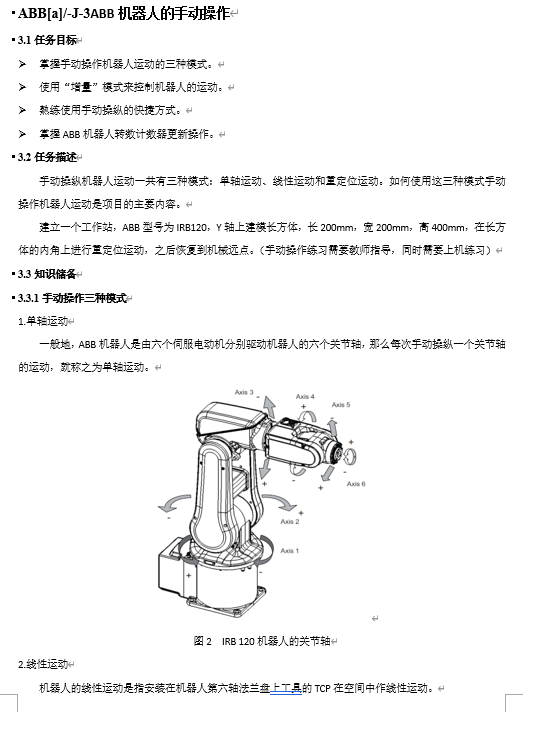
1.单轴运动
1.手动操纵的快捷按钮
11.选择“编辑电动机校准偏移”。
12.将机器人本体上电动机校准偏移记录下来(位于机器人机身)。
1)更换伺服电动机转数计数器电池后。
2.单击“捕捉末端”。
2.对3D模型进行相关设置
2.手动操纵的快捷菜单
2.线性运动
2)当转数计数器发生故障,修复后。
3.单击B角点。
3.单击“显示详情”展开菜单。
3.1任务目标
3.2任务描述
3.3.1手动操作三种模式
3.3.2RobotStudio中的建模功能
3.3知识储备
3.4.1单轴运动的手动操纵
3.4.2线性运动
3.4.3重定位运动
3.4.4增量模式控制机器人运动
3.4任务实施
3.5.1手动操纵的快捷方式
3.5.2ABB机器人转数计数器更新操作
3.5.3RobotStudio中测量工具的使用
3.5知识链接
3.重定位运动
(1)测量垛板的长度
(2)测量锥体的角度
(3)测量圆柱体的直径
(4)测量两个物体间最短距离
(5)测量的技巧
..............................
下一篇:尚无数据