机械臂结构培训教材(PPT 38页)
- 所属分类:
- 机械行业
- 文件大小:
- 4503 KB
- 下载地址:
- 相关资料:
- 培训教材
机械臂结构培训教材(PPT 38页)内容简介
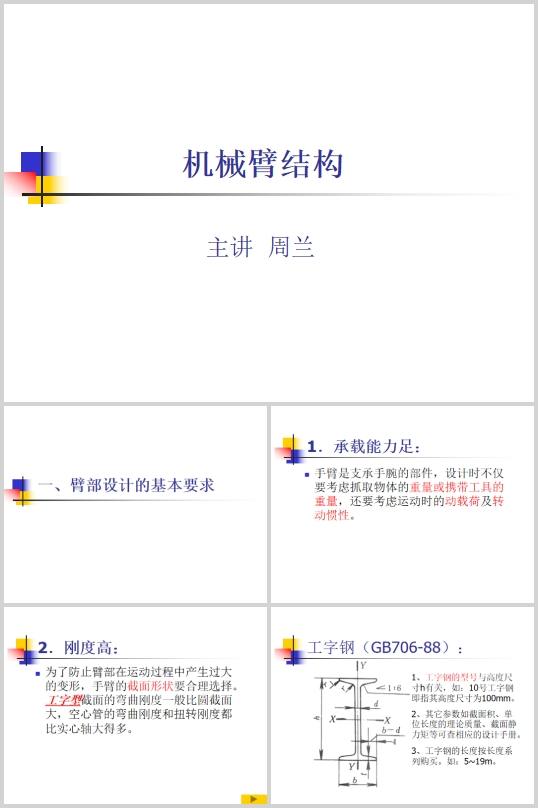
机械臂结构
一、臂部设计的基本要求
1.承载能力足:
2.刚度高:
工字钢(GB706-88):
槽钢(GB707-88)
3、导向性能好,定位精度高:
4.重量轻、转动惯量小:
5.合理设计与腕部和机身的连接部位:
二、机械臂的运动形式
1.直角坐标型:
2.圆柱坐标型:
3.关节型:
4.极坐标型:
三、典型机械臂结构
1.手臂直线运动机构
油缸—齿条机构图例:
油缸驱动的手臂伸缩运动结构图例:
电机驱动丝杆螺母直线运动结构图例:
2.手臂的回转运动机构
平面四杆机构图例:
平面四杆机构演变图例:
双臂机器人手臂结构图例:
齿轮驱动回转机构图例:
3.关节型机械臂的结构(1)
五轴关节型机器人手臂运动图例(1):
五轴关节型机器人手臂运动图例(2):
3.关节型机械臂的结构(2)
四、机械臂的控制
1、伺服系统的分类:
伺服直线液压缸图例:
电动伺服控制系统图例
..............................
一、臂部设计的基本要求
1.承载能力足:
2.刚度高:
工字钢(GB706-88):
槽钢(GB707-88)
3、导向性能好,定位精度高:
4.重量轻、转动惯量小:
5.合理设计与腕部和机身的连接部位:
二、机械臂的运动形式
1.直角坐标型:
2.圆柱坐标型:
3.关节型:
4.极坐标型:
三、典型机械臂结构
1.手臂直线运动机构
油缸—齿条机构图例:
油缸驱动的手臂伸缩运动结构图例:
电机驱动丝杆螺母直线运动结构图例:
2.手臂的回转运动机构
平面四杆机构图例:
平面四杆机构演变图例:
双臂机器人手臂结构图例:
齿轮驱动回转机构图例:
3.关节型机械臂的结构(1)
五轴关节型机器人手臂运动图例(1):
五轴关节型机器人手臂运动图例(2):
3.关节型机械臂的结构(2)
四、机械臂的控制
1、伺服系统的分类:
伺服直线液压缸图例:
电动伺服控制系统图例
..............................
下一篇:尚无数据