机器人初等教育培训资料(PPT 59页)
机器人初等教育培训资料(PPT 59页)内容简介
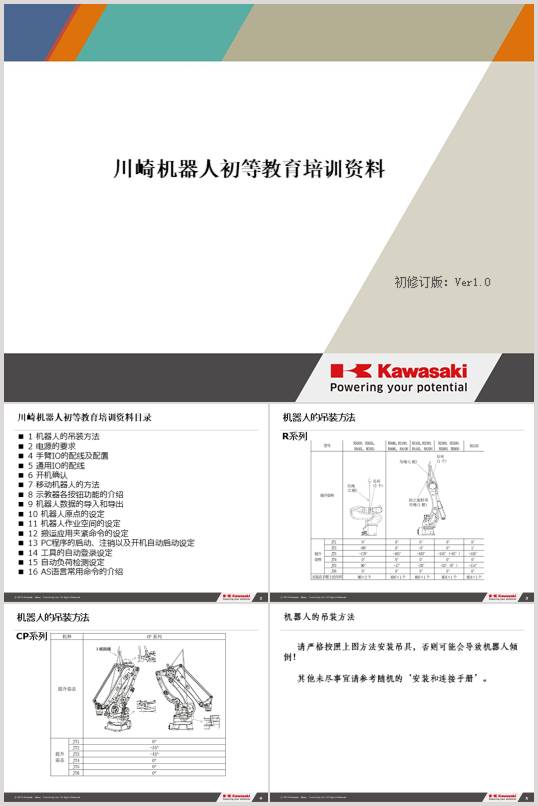
1机器人的吊装方法
2电源的要求
4手臂IO的配线及配置
5通用IO的配线
6开机确认
7移动机器人的方法
8示教器各按钮功能的介绍
9机器人数据的导入和导出
10机器人原点的设定
11机器人作业空间的设定
12搬运应用夹紧命令的设定
13PC程序的启动、注销以及开机自动启动设定
14工具的自动登录设定
15自动负荷检测设定
16AS语言常用命令的介绍
川崎机器人初等教育培训资料
川崎机器人初等教育培训资料目录
机器人的吊装方法
机器人电源的要求
手臂IO的配线及配置RS系列输入
手臂IO的配线及配置RS系列输出
手臂IO的配线及配置CP系列输入
手臂IO的配线及配置CP系列输出
手臂IO的配线说明R系列
手臂信号的分配
开机后,按菜单键进入辅助功能-输入输出信号-手臂ID板信号设定
通用输入信号接线原理图
通用输出信号接线原理图
通用IO的配线的说明
移动机器人的方法
基于各轴JONIT坐标系下移动机器人
基于基础坐标系BASE下移动机器人(1)
示教器上其余各键功能的介绍
常用辅助功能菜单
..............................
2电源的要求
4手臂IO的配线及配置
5通用IO的配线
6开机确认
7移动机器人的方法
8示教器各按钮功能的介绍
9机器人数据的导入和导出
10机器人原点的设定
11机器人作业空间的设定
12搬运应用夹紧命令的设定
13PC程序的启动、注销以及开机自动启动设定
14工具的自动登录设定
15自动负荷检测设定
16AS语言常用命令的介绍
川崎机器人初等教育培训资料
川崎机器人初等教育培训资料目录
机器人的吊装方法
机器人电源的要求
手臂IO的配线及配置RS系列输入
手臂IO的配线及配置RS系列输出
手臂IO的配线及配置CP系列输入
手臂IO的配线及配置CP系列输出
手臂IO的配线说明R系列
手臂信号的分配
开机后,按菜单键进入辅助功能-输入输出信号-手臂ID板信号设定
通用输入信号接线原理图
通用输出信号接线原理图
通用IO的配线的说明
移动机器人的方法
基于各轴JONIT坐标系下移动机器人
基于基础坐标系BASE下移动机器人(1)
示教器上其余各键功能的介绍
常用辅助功能菜单
..............................