工业机器人基础知识培训教材(PPT 45页)
工业机器人基础知识培训教材(PPT 45页)内容简介
工作空间也称工作范围、工作行程。工业机器人执行任务时,
其手腕参考点或末端操作器安装点(不包括末端操作器)
所能掠过的空间,一般不包括末端操作器本身所能到达的区域。
目前,单体工业机器人本体的工作范围可达3.5 m 左右。
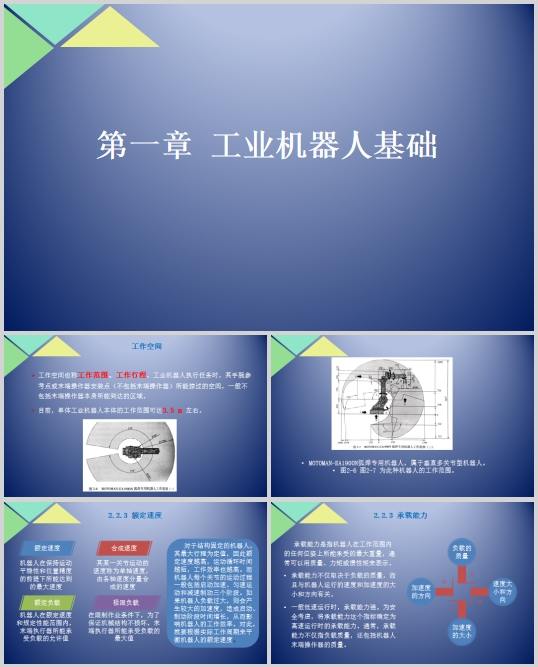
MOTOMAN-EA1900N弧焊专用机器人,属于垂直多关节型机器人。
图2-6 图2-7 为此种机器人的工作范围。
对于结构固定的机器人,其最大行程为定值,因此额定速度越高,
运动循环时间越短,工作效率也越高。
而机器人每个关节的运动过程一般包括启动加速、
匀速运动和减速制动三个阶段。如果机器人负载过大,则会产生较大的加速度,
造成启动、制动阶段时间增长,从而影响机器人的工作效率。对此,
就要根据实际工作周期来平衡机器人的额定速度
..............................
其手腕参考点或末端操作器安装点(不包括末端操作器)
所能掠过的空间,一般不包括末端操作器本身所能到达的区域。
目前,单体工业机器人本体的工作范围可达3.5 m 左右。
MOTOMAN-EA1900N弧焊专用机器人,属于垂直多关节型机器人。
图2-6 图2-7 为此种机器人的工作范围。
对于结构固定的机器人,其最大行程为定值,因此额定速度越高,
运动循环时间越短,工作效率也越高。
而机器人每个关节的运动过程一般包括启动加速、
匀速运动和减速制动三个阶段。如果机器人负载过大,则会产生较大的加速度,
造成启动、制动阶段时间增长,从而影响机器人的工作效率。对此,
就要根据实际工作周期来平衡机器人的额定速度
..............................
下一篇:尚无数据