机器人机械结构设计步骤(PPT 41页)
机器人机械结构设计步骤(PPT 41页)内容简介
3、结构设计
2.2工业机器人的驱动与传动系统结构
2.2.2驱动器的类型和特点
3.其它驱动器
作为特殊的驱动装置,有压电晶体、形状记忆合金、
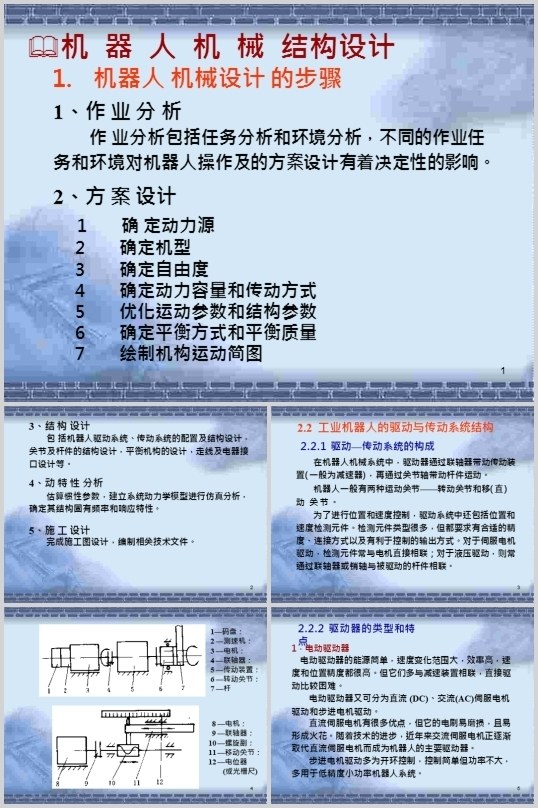
2.2.3机器人的常用传动机构
滚动螺旋传动
滚动螺旋传动是在具有螺旋槽的丝杠与螺母之间放入适当的滚珠。使丝杠与螺母之间由滑动摩擦变为滚动摩擦的一种螺旋传动,滚珠在工作过程中顺螺旋槽(滚道)滚动,故必须设置滚珠的返回通道,才能循环使用。为了消除回差(空回),螺母分
2.3工业机器人关节的构造及其传动配置
关节是操作机各杆件间的结合部分,有转动和移动两种类型。工业机器人前三关节通常称作腰关节、肩关节和肘关节,它们构成了操作机的位置机构。后面关节构成了操作机的姿态机构,称作腕部。下面分别讨论这些关节的构造和传动配置。
一、腰关节
..............................
2.2工业机器人的驱动与传动系统结构
2.2.2驱动器的类型和特点
3.其它驱动器
作为特殊的驱动装置,有压电晶体、形状记忆合金、
2.2.3机器人的常用传动机构
滚动螺旋传动
滚动螺旋传动是在具有螺旋槽的丝杠与螺母之间放入适当的滚珠。使丝杠与螺母之间由滑动摩擦变为滚动摩擦的一种螺旋传动,滚珠在工作过程中顺螺旋槽(滚道)滚动,故必须设置滚珠的返回通道,才能循环使用。为了消除回差(空回),螺母分
2.3工业机器人关节的构造及其传动配置
关节是操作机各杆件间的结合部分,有转动和移动两种类型。工业机器人前三关节通常称作腰关节、肩关节和肘关节,它们构成了操作机的位置机构。后面关节构成了操作机的姿态机构,称作腕部。下面分别讨论这些关节的构造和传动配置。
一、腰关节
..............................
下一篇:尚无数据