智能控制模糊控制设计实例(PPT 25页)
智能控制模糊控制设计实例(PPT 25页)内容简介
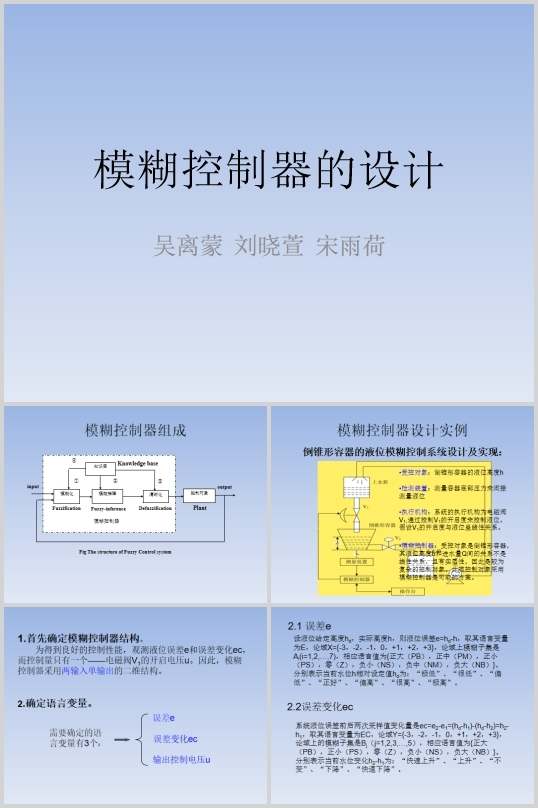
受控对象:倒锥形容器的液位高度h
检测装置:测量容器底部压力来间接测量液位
执行机构:系统的执行机构为电磁阀V1
,通过控制V1的开启度来控制液位。假设V1的开启度与液位呈线性关系。
模糊控制器:受控对象是倒锥形容器,其液位高度h和进水量Q间的关系不是线性关系,
且有实质性,因此是较为复杂的控制对象。此类控制对象采用模糊控制器是可取的方案。
首先确定模糊控制器结构。
为得到良好的控制性能,观测液位误差e和误差变化ec,
而控制量只有一个――电磁阀V1的开启电压u。因此,模糊控制器采用两输入单输出的二维结构。
2.确定语言变量。
设液位给定高度hd,实际高度h,则液位误差e=hd-h,取其语言变量为E,
论域X={-3,-2,-1,0,+1,+2,+3},论域上模糊子集是Ai(i=1,2,…,7),相应语言值为{正大(PB)
,正中(PM),正小(PS),零(Z),负小(NS),负中(NM),负大(NB)}。
分别表示当前水位h相对设定值hd为:“极低”、“很低”、
“偏低”、“正好”、“偏高”、“很高”、“极高”。
..............................
检测装置:测量容器底部压力来间接测量液位
执行机构:系统的执行机构为电磁阀V1
,通过控制V1的开启度来控制液位。假设V1的开启度与液位呈线性关系。
模糊控制器:受控对象是倒锥形容器,其液位高度h和进水量Q间的关系不是线性关系,
且有实质性,因此是较为复杂的控制对象。此类控制对象采用模糊控制器是可取的方案。
首先确定模糊控制器结构。
为得到良好的控制性能,观测液位误差e和误差变化ec,
而控制量只有一个――电磁阀V1的开启电压u。因此,模糊控制器采用两输入单输出的二维结构。
2.确定语言变量。
设液位给定高度hd,实际高度h,则液位误差e=hd-h,取其语言变量为E,
论域X={-3,-2,-1,0,+1,+2,+3},论域上模糊子集是Ai(i=1,2,…,7),相应语言值为{正大(PB)
,正中(PM),正小(PS),零(Z),负小(NS),负中(NM),负大(NB)}。
分别表示当前水位h相对设定值hd为:“极低”、“很低”、
“偏低”、“正好”、“偏高”、“很高”、“极高”。
..............................
上一篇:人工智能AI(PPT 24页)
下一篇:尚无数据