ABB机器人外部启动配置说明(DOC 20页)
- 所属分类:
- 智能制造
- 文件大小:
- 979 KB
- 下载地址:
- 相关资料:
- 机器人
ABB机器人外部启动配置说明(DOC 20页)内容简介
一、外部IO板的配置
三、MAIN程序的编辑
二、利用608-1worldzone软件包设置待机位置和干涉区
1、定义DSQC652板的总线连接
2、创建数字输入信号DI1
3、创建数字输出信号DO1
4、创建组输入信号GI1
5、创建组输出信号GO1
6、关联外部IO信号与系统变量
ABB机器人外部启动配置说明
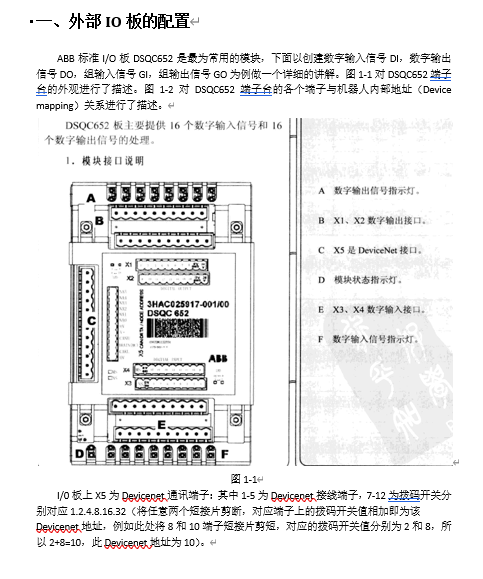
ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,
数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述
。图1-2对DSQC652端子台的各个端子与机器人内部地址(Devicemapping)关系进行了描述。
ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,
通过X5端口与DeviceNet现场总线进行通讯。
ActionMotoron设定输入信号IN1有效时的动作
Address10设定IO板在总线中的地址
AssignedtoDeviceDSQC65224VDCI/ODevice设定信号所在的IO模块
DeviceMapping1设定信号所占用的地址
DeviceMapping1,2,4-3设定信号所占用的地址
I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,
7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,
对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,
对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
InvertPhysicalValueNO如果想将信号取反,可选Yes
IO配置的导出与导入见下图:
Named652设定IO板在系统中的名字
NameDI1设定数字输入信号的名字
NameDO1设定数字输出信号的名字
NameGI1设定组输入信号的名字
NameGO1设定组输出信号的名字
SignalNameIN1设定输入端信号的名称
TypeofSignalDigitalInput设定信号的类型
TypeofSignalDigitalOutput设定信号的类型
TypeofSignalGroupInput设定信号的类型
TypeofSignalGroupOutput设定信号的类型
..............................
三、MAIN程序的编辑
二、利用608-1worldzone软件包设置待机位置和干涉区
1、定义DSQC652板的总线连接
2、创建数字输入信号DI1
3、创建数字输出信号DO1
4、创建组输入信号GI1
5、创建组输出信号GO1
6、关联外部IO信号与系统变量
ABB机器人外部启动配置说明
ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,
数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述
。图1-2对DSQC652端子台的各个端子与机器人内部地址(Devicemapping)关系进行了描述。
ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,
通过X5端口与DeviceNet现场总线进行通讯。
ActionMotoron设定输入信号IN1有效时的动作
Address10设定IO板在总线中的地址
AssignedtoDeviceDSQC65224VDCI/ODevice设定信号所在的IO模块
DeviceMapping1设定信号所占用的地址
DeviceMapping1,2,4-3设定信号所占用的地址
I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,
7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,
对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,
对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
InvertPhysicalValueNO如果想将信号取反,可选Yes
IO配置的导出与导入见下图:
Named652设定IO板在系统中的名字
NameDI1设定数字输入信号的名字
NameDO1设定数字输出信号的名字
NameGI1设定组输入信号的名字
NameGO1设定组输出信号的名字
SignalNameIN1设定输入端信号的名称
TypeofSignalDigitalInput设定信号的类型
TypeofSignalDigitalOutput设定信号的类型
TypeofSignalGroupInput设定信号的类型
TypeofSignalGroupOutput设定信号的类型
..............................
下一篇:尚无数据