ABB机器人的程序数据建立方法(DOC 32页)
ABB机器人的程序数据建立方法(DOC 32页)内容简介
(1)变量VAR
(2)可变量PERS
(3)常量CONST
5.1任务目标
5.2任务描述
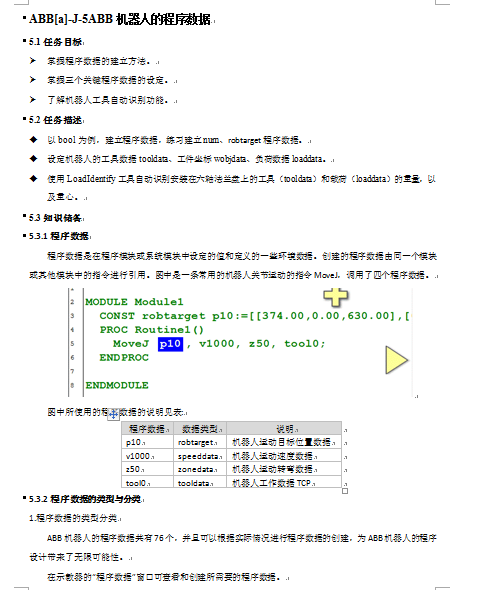
5.3.1程序数据
5.3.2程序数据的类型与分类
5.3知识储备
5.4.1建立程序数据
5.4.2三个关键的程序数据的设定
5.4任务实施
5.5.1复杂程序数据赋值
5.5.2工具自动识别程序
5.5知识链接
5点法,改变tool0的Z方向
1.ABB菜单中,选择“手动操纵”。
1.ABB菜单中,选择“程序数据”。
1.“手动操纵”界面,选择“有效载荷”。
1.使用手动操纵功能,把机器人回到机械原点位置。
1.在“手动操纵”界面,选择“工具坐标”。
1.在手动操纵画面中,选择“工件坐标”。
10.工具参考点变换姿态靠上固定点。
10.手动操作机器人的工具参考点靠近定义工件坐标的Y1点。
10.进行慢速测试。
11.单击“修改位置”,将Y1点记录下来。
11.单击“修改位置”,将点2位置记录下来。
11.等待机器人完成测试步骤,观察机器人动作是否有被干涉,
一直按住使能键(使能键如果断开,需要重新开始测试过程)。
12.切换到自动状态,点击播放键,重新进入识别程序画面,点击“MOVE”。
12.工具参考点变换姿态靠上固定点。
13.单击“修改位置”,将点3位置记录下来。
13.完成后跳到画面,切换为手动,显示测量结果(包括重量、重心、准确度等),
确认无误后,点击“Yes”将结果写入工具数据。
13.对自动生成的工件坐标数据进行确认后,单击“确定”。
14.工具参考点变换姿态靠上固定点。这是第4个点,工具参考点垂直于固定点。
14.点击“取消调用例行程序”回到程序编辑画面。
14.选中wobj1后,单击确定。
15.单击“修改位置”,将点4位置记录下来。
15.设定手动操纵画面项目,使用线性动作模式,体验新建立的工件坐标。
16.工具参考点以点4的姿态从固定点移动到工具TCP的+X方向。
17.单击“修改位置”,将延伸器点X位置记录下来。
18.工具参考点以此姿态从固定点移动到工具TCP的Z方向。
19.单击“修改位置”,将延伸器点Z位置记录下来。
..............................
(2)可变量PERS
(3)常量CONST
5.1任务目标
5.2任务描述
5.3.1程序数据
5.3.2程序数据的类型与分类
5.3知识储备
5.4.1建立程序数据
5.4.2三个关键的程序数据的设定
5.4任务实施
5.5.1复杂程序数据赋值
5.5.2工具自动识别程序
5.5知识链接
5点法,改变tool0的Z方向
1.ABB菜单中,选择“手动操纵”。
1.ABB菜单中,选择“程序数据”。
1.“手动操纵”界面,选择“有效载荷”。
1.使用手动操纵功能,把机器人回到机械原点位置。
1.在“手动操纵”界面,选择“工具坐标”。
1.在手动操纵画面中,选择“工件坐标”。
10.工具参考点变换姿态靠上固定点。
10.手动操作机器人的工具参考点靠近定义工件坐标的Y1点。
10.进行慢速测试。
11.单击“修改位置”,将Y1点记录下来。
11.单击“修改位置”,将点2位置记录下来。
11.等待机器人完成测试步骤,观察机器人动作是否有被干涉,
一直按住使能键(使能键如果断开,需要重新开始测试过程)。
12.切换到自动状态,点击播放键,重新进入识别程序画面,点击“MOVE”。
12.工具参考点变换姿态靠上固定点。
13.单击“修改位置”,将点3位置记录下来。
13.完成后跳到画面,切换为手动,显示测量结果(包括重量、重心、准确度等),
确认无误后,点击“Yes”将结果写入工具数据。
13.对自动生成的工件坐标数据进行确认后,单击“确定”。
14.工具参考点变换姿态靠上固定点。这是第4个点,工具参考点垂直于固定点。
14.点击“取消调用例行程序”回到程序编辑画面。
14.选中wobj1后,单击确定。
15.单击“修改位置”,将点4位置记录下来。
15.设定手动操纵画面项目,使用线性动作模式,体验新建立的工件坐标。
16.工具参考点以点4的姿态从固定点移动到工具TCP的+X方向。
17.单击“修改位置”,将延伸器点X位置记录下来。
18.工具参考点以此姿态从固定点移动到工具TCP的Z方向。
19.单击“修改位置”,将延伸器点Z位置记录下来。
..............................
下一篇:尚无数据